In a recent publication by the Journal of Field Robotics titled “A cable‐driven underwater robotic system for delicate manipulation of marine biology samples” researchers have introduced an innovative underwater manipulator (UM) designed for the precise handling of sensitive marine species. This new development emphasizes the need for sophisticated technology in underwater environments, highlighting the importance of preserving fragile ecosystems while conducting scientific investigations. The article details the UM’s lightweight and compact design, which minimizes interference with the underwater vehicle (UV) it operates alongside, making it a valuable tool for marine biologists.

Innovative Design and Capabilities
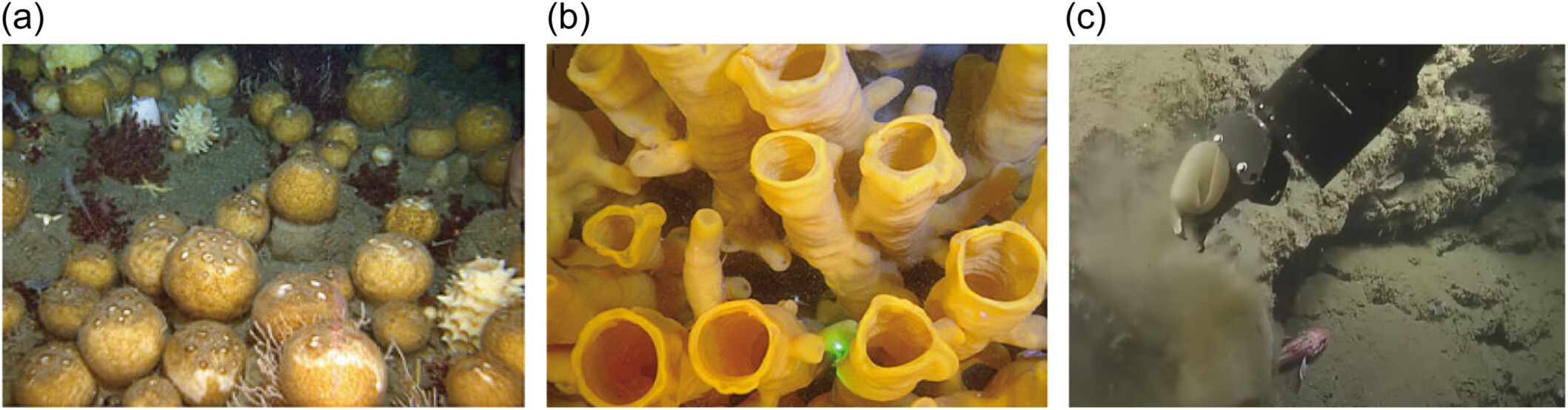
The underwater manipulator (UM) is designed with a lightweight cable-driven structure that enhances its capability to perform delicate tasks, such as deep-sea reef sampling. By integrating force sensors, the UM and its gripper are capable of soft and sensitive manipulation, ensuring that delicate marine species such as corals and sponges are handled with care. This sensitivity is crucial for the preservation of marine tissues during sample collection.
One significant aspect of the UM’s design is the reduction in the coupling effect between the UM and the underwater vehicle (UV). This reduction improves the stability and precision of the system, enabling efficient operation in various underwater conditions. The UM’s accurate force exertion capabilities also facilitate precise localization and approach to reef samples, which is essential for effective sampling operations.
Simulation and Performance Evaluation
Extensive simulations have been conducted to derive the necessary specifications for the UM’s actuators and sensors, ensuring compatibility with UVs operating at speeds ranging from 1 to 4 knots. These simulations confirm the system’s performance in achieving accurate trajectory tracking and delicate grasping of different underwater species. For instance, the UM has been tested with samples like a sponge skeleton and Neptune’s necklace seaweed, demonstrating its capability to handle various forms of marine life without causing damage.
Compared to previous underwater robotic systems, this UM stands out due to its enhanced precision and reduced interference with the UV. Earlier models often struggled with stability and delicate handling, which limited their effectiveness in sensitive environments. The current design addresses these issues by integrating advanced force control mechanisms and a lightweight structure, making it more suitable for the preservation of marine ecosystems during scientific exploration.
Previously, underwater robots faced challenges related to the robustness and adaptability required for diverse underwater conditions. Earlier systems lacked the fine force control needed for handling fragile samples. In contrast, the new UM introduces a model-free robust-adaptive position/force controller that significantly improves the accuracy and gentleness of sample manipulation, addressing the shortcomings of past technologies.
The advancements presented in this article represent a significant step forward in underwater robotics, particularly in the context of marine biology research. By providing a tool that can handle delicate samples without causing damage, researchers can gather more accurate data, leading to better understanding and preservation of marine ecosystems. This development could potentially revolutionize the way scientists interact with underwater environments.
For marine biologists and researchers, the ability to collect samples without harming them is invaluable. The underwater manipulator’s design allows for precise control and gentle handling, making it an essential tool for future underwater explorations. Its compatibility with various UV speeds and its verified performance in simulations and real-world tests highlight its practicality and effectiveness in marine research.