
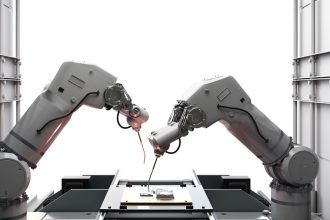
All3 Launches AI-Powered Robotics System for Building Construction
All3 launches a fully integrated AI-robotics system for building construction. The company directly targets developers, focusing on urban housing projects.…

Roboworx Supports Miso Robotics’ Nationwide Rollout of Flippy Robots
Roboworx will provide installation and maintenance for Miso's Flippy robots nationwide. The agreement supports a subscription-based robotic fry station at…
ANYbotics Adds Gas Leak Detection to ANYmal Robot Platform
ANYbotics has equipped ANYmal with modular gas detection and acoustic imaging. The new system enables automated inspection and real-time data…

Walmart Expands Drone Delivery Services to Major U.S. Cities
Walmart and Wing expand drone delivery to five new major U.S. cities. Service focuses on rapid home delivery of groceries…

HEBI Robotics Secures Army Grant, Develops Robots for Hazardous Sites
HEBI Robotics received an Army SBIR grant for hazardous environment robots. The project aims for Class I, Division 1 certification…
Saildrone and Meta Deploy Autonomous Surveyor for North Atlantic Cable Mapping
Saildrone and Meta completed an autonomous deep-water cable route survey. The Surveyor USV matched traditional vessel data accuracy and cut…

PlusAI Takes Public Path as It Pursues Autonomous Trucking Rollout
PlusAI is going public through a merger with a SPAC. The company aims to launch factory-built Level 4 autonomous trucks…

Industry Leaders Tackle Mobile Robot Integration in Warehouses
Warehouse automation relies increasingly on mobile robots and orchestration technologies. Brand partnerships like Vanderlande and Hai Robotics focus on scalable,…
Simbe Rolls Out Inventory Robots at DeCicco & Sons Stores
Simbe Robotics partners with DeCicco & Sons to deploy Tally inventory robots. The Store Intelligence platform improves pricing accuracy and…

HistoSonics Gains U.K. Access for Edison Tumor Therapy System
Edison gains early U.K. market access via the IDAP program. Insurance reimbursement begins in Michigan for Edison-based liver tumor treatment.…





